
W rozdziale tym porównam trzy algorytmy kontroli przeciążenia. W celu porównania algorytmów skorzystam z symulacji przeprowadzonych przez niezależne organizacje. Symulacje zostały przeprowadzone za pomocą własnych pakietów symulacyjnych. Chcąc powtórzyć podobne symulacje lub chcąc rozszerzyć zakres symulacji należałoby albo napisać do tego celu program albo zakupić odpowiedni pakiet symulacyjny. Jednym z takich komercyjnych programów umożliwiających przeprowadzenie symulacji metod kontroli przeciążenia jest pakiet OPNET firmy MIL3. Inne znane dostępne pakiet nie pozwalają na zbyt dużą ingerencję w mechanizmy kontroli przeciążenia.
Do symulacji trzech algorytmów zostanie użyta konfiguracja sieci składająca się z pięciu przełączników i z siedmiu par: nadawca-odbiorca. Odległość pomiędzy dwoma sąsiednimi przełącznikami wynosi 1000km a między przełącznikiem a węzłem sieci 100m. Wszystkie łącza mają przepustowość równą 45Mb/s.
Uwzględniając odległość połączenia w symulacji możemy wyróżnić trzy rodzaj połączeń:
Długodystansowe: połączenie od nadawcy 0 przechodzi przez cztery przełączniki. Połączenie to oznaczymy jaki VC0.
Średniodystansowe: połączenia od nadawcy 1 i 4 składają się z dwóch przełączników. Połączenia oznaczamy odpowiedni VC1 i VC4.
Krótkodystansowe: połączenia od nadawcy 2, 3, 5 i 6 przechodzą tylko przez jeden przełącznik. Połączenia oznaczamy odpowiedni VC2, VC3, VC5 i VC6.
Konfigurację testową przedstawia Rysunek 12.
Symulacja dotyczyć się będzie jednego z ważniejszych aspektów działania algorytmu, tzn. „sprawiedliwego” rozdziału dostępnego pasma pomiędzy poszczególne kanały wirtualne. Używając metody sugerowanej przez ATM Forum możemy obliczyć optymalne teoretyczne pasmo dla każdego połączenia (współczynnik fairshare). Obliczenia te zostały przedstawione w tabeli 3.
Tabela 3. Oczekiwane pasma przepustowe dla każdego połączenia w Mb/s
| VC0 | VC1 | VC2 | VC3 | VC4 | VC5 | VC6 |
| 3.75 | 3.75 | 7.5 | 3.75 | 3.75 | 7.5 | 11.25 |
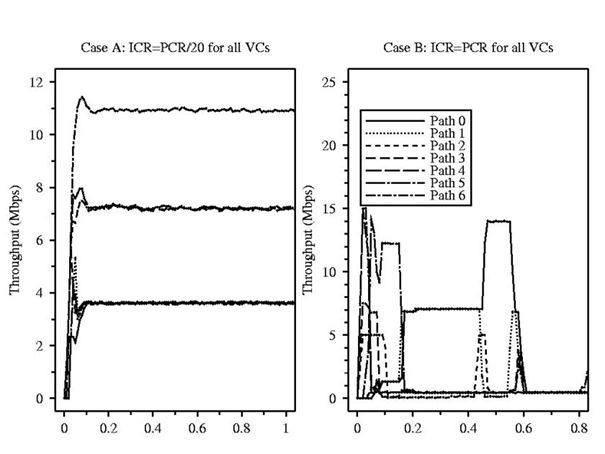
Symulacje zostały przeprowadzone dla dwóch parametrów ICR (initial cell rate), czyli początkowej prędkości nadawania, równych PCR i PCR/20.
Dla wszystkich urządzeń nadawczych startujących z parametrem ICR=PCR/20 osiągnięto prawie idealne wyniki. Wszystkie kanały wirtualne mające podobną drogę połączenia otrzymały prawie takie samo pasmo przepustowe. Dostępne pasmo zostało sprawiedliwie rozdzielone, jedynie można zauważyć krótkotrwały okres nieustalony.
Jednak dla parametru startowego ICR=PCR, zauważono błąd w algorytmie. Podczas długiego przeciążenia spowodowanego ustawieniem parametrów początkowych, przełączniki kilkukrotnie redukowały pasmo przepustowe dla poszczególnych kanałów, współczynnik fairshare osiągnął w końcu wartość 0. Wartość współczynnika fairshare pozostała równe 0 nawet kiedy wszystkie kanały przestały nadawać. Wyniki testów przedstawione zostały w tabeli 4 i na rysunku 13.
Tabela 4. Osiągnięte pasmo przepustowe dla połączeń w algorytmu CAPC
| VC0 | VC1 | VC2 | VC3 | VC4 | VC5 | VC6 |
| 3.5 | 3.6 | 7.2 | 3.6 | 3.6 | 7.2 | 10.8 |
Rysunek 13. Średnia przepustowość uzyskana dla algorytmu CAPC
Algorytm ERPCA do obliczenia optymalnego pasma przepustowego dla każdego połączenia używa informacji zawartych w odbieranych komórkach RM. Algorytm ten jest najprostszym z symulowanych algorytmów. Symulacja wykazała, że w porównaniu do algorytmu CAPC, osiągającego stabilny i ustalony stan w krótkim odcinku czasy, osiągnięta przepustowość dla danego połączenia jest niestabilna i silnie oscyluje wokół optymalnej przepustowości. Zmieniając współczynniki algorytmu można uzyskać różną charakterystykę przepustowości. Dla większego parametru a możemy osiągnąć szybką reakcję na stan sieci, ale kosztem większej oscylacji przepustowości. Dla małego parametru a możemy osiągnąć stabilizację przepustowości, ale kosztem dłuższego stanu nieustalonego. Wyniki osiągnięte w symulacji przedstawia Tabela 5 i Rysunek 14.
Tabela 5. Osiągnięte pasma przepustowe dla połączeń w algorytmie ERPCA
| VC0 | VC1 | VC2 | VC3 | VC4 | VC5 | VC6 |
| 3.3 | 3.7 | 7 | 3.7 | 4 | 7.6 | 11.6 |
Rysunek 14. Średnia przepustowość uzyskana dla algorytmu EPRCA

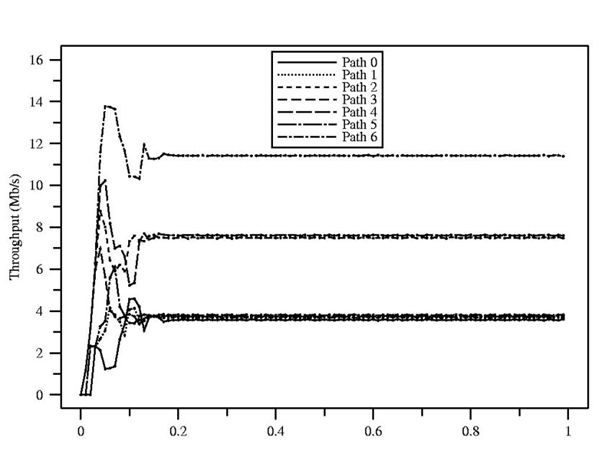
Algorytm MIT jest najbardziej skomplikowanym algorytmem, wymagającym wielu obliczeń. Obliczenia te jednak nie są skomplikowane i nie wprowadzają zbyt dużego obciążenia obliczeniowego.
Rezultatem wprowadzenia większej ilości obliczeń jest osiągnięta stabilność, bardzo dobre wykorzystanie całego dostępnego pasma i „sprawiedliwe” jego rozdzielenie pomiędzy wszystkie kanały wirtualne. Wyniki osiągnięte w symulacji przedstawia Tabela 6 i Rysunek 15.
Tabela 6. Osiągnięte pasma przepustowe dla połączeń w algorytmie MIT
| VC0 | VC1 | VC2 | VC3 | VC4 | VC5 | VC6 |
| 3.4 | 3.6 | 7.3 | 3.9 | 3.7 | 7.5 | 11.2 |
Rysunek 15. Średnia przepustowość uzyskana dla algorytmu MIT
Algorytmy kontroli przeciążenia powinny się cechować: skalowalnością, optymalnością, odpornością i implementowalnością. Z opisów algorytmów i analizy symulacji wynika, że żaden z przedstawionych algorytmów nie spełnia w pełni wszystkich cech. Żaden algorytm ze względu na brak niektórych standardów nie może być implementowany jednocześnie w sieciach lokalnych i rozległych. W bardzo szybkich nowopowstających sieciach rozległych ATM algorytmy typu rate-based są zbyt wolne i nie nadążają czasami za gwałtownymi zmianami stanów sieci. Algorytmy typu credit-based pozbawione tej wady, ze względu na konieczność implementacji osobnych kolejek dla każdego kanału wirtualnego w przełącznikach są obecnie zbyt skomplikowane technologicznie aby mogły być wdrożone. ATM Forum wstrzymała z tego powodu pracę nad algorytmami credit-based i zajęła się udoskonalaniem algorytmów typu rate-based.
Algorytmy bazujące na bitowym sprzężeniu zwrotnym okazały się zbyt wolne, a brak informacji w sprzężeniu zwrotnym na temat stanu sieci (dostępne pasmo, prędkość transmisji) nie umożliwia efektywnej kontroli ruchem. Algorytmy te także w niektórych specyficznych konfiguracja nie sprawiedliwie rozdzielały dostępne pasmo, faworyzując niektórych użytkowników. Najlepszymi do tej pory okazały się algorytmy: CAPC, ERPCA i MIT. Jednak algorytmy te nie są także idealnymi metodami kontroli przeciążenia. Wszystkie trzy algorytmy sprawiedliwie rozdzielają dostępne pasmo. Algorytm CAPC nie rodził sobie z długotrwałym, początkowym przeciążeniem, powodując zatrzymanie transmisji. Algorytm ERPCA, jeden z najprostszych algorytmów, cechował się dość dużymi oscylacjami przydzielanego pasma i nie osiągał stabilizacji takiej jak pozostałe algorytmy. Najlepszym algorytmem okazał się algorytm MIT, który „najsprawiedliwiej” rozdzielił pasmo przepustowe, osiągną szybko stabilizację prędkości ruchu dla poszczególnych użytkowników. Algorytm ten wymaga prostych obliczeń dla każdego kanału wirtualnego, co w przypadku konfiguracji testowej składającej się z 7 kanałów wirtualnych nie stanowiło problem. Jednak w rzeczywistych warunkach przełącznik obsługuje jednocześnie tysiące kanałów wirtualnych, ilość nieskomplikowanych obliczeń i czas w jakim mają być wykonane wówczas rośnie na tyle, że przekraczają one obecnie moc dostępnych procesorów mogących być zastosowanych w przełącznikach.
Jak widać nie istnieje jeszcze „idealny” algorytm kontroli przeciążeniem. Prace nad niektórymi słabszymi algorytmami zostały wstrzymane, najlepsze algorytmy są w ciągłej fazie udoskonaleń i testów.
Organizacje standaryzacyjne muszą wybrać jeden najlepszy algorytm albo też zdecydować się na kilka algorytmów i starać się zapewnić kompatybilność pomiędzy poszczególnymi algorytmami. Jest to trudny wybór, którego organizacjom do tej pory nie udało się dokonać. Problem przeciążenia jeszcze długo będzie tematem otwartym, czekającym na nowe, lepsze rozwiązania.
Niniejsza praca stanowi próbę przedstawienia problemu przeciążenia i analizy dostępnych metod jego rozwiązania. Posiadając odpowiedni pakiet symulacyjny można kontynuować rozpoczętą pracę nad problemem przeciążenia, np. wybierając jeden z algorytmów, spróbować optymalizować jego parametry a nawet starać się modyfikować algorytm, likwidując jego wady. Badania takie dałyby ogromną wiedzę nie tylko na temat problemu przeciążenia, ale także na temat całej technologii ATM.
